基于大模型的四足机器狗能力挑战赛
目录
形式:线上仿真初赛+线下硬件决赛(线上与线下规则一致)
赛道负责单位及硬件:宇树
基于大模型的四足机械狗能力挑战赛
1.规则概述
1.1 竞赛内容
聚焦"大模型+四足机械狗"的虚实协同技术验证,考核九格4B大模型在自然语言交互、动态路径规划、机械臂精准操作等工业场景的实战能力。
2.比赛场地及道具要求
2.1 场地要求
1)尺寸:5m×6m结构化场景;
2)功能区:起点/终点、识别区(3色方块)、抓取区(数字方块)、放置区、障碍区(含20cm台阶);
3)导航标识:100mm黑色导引线。
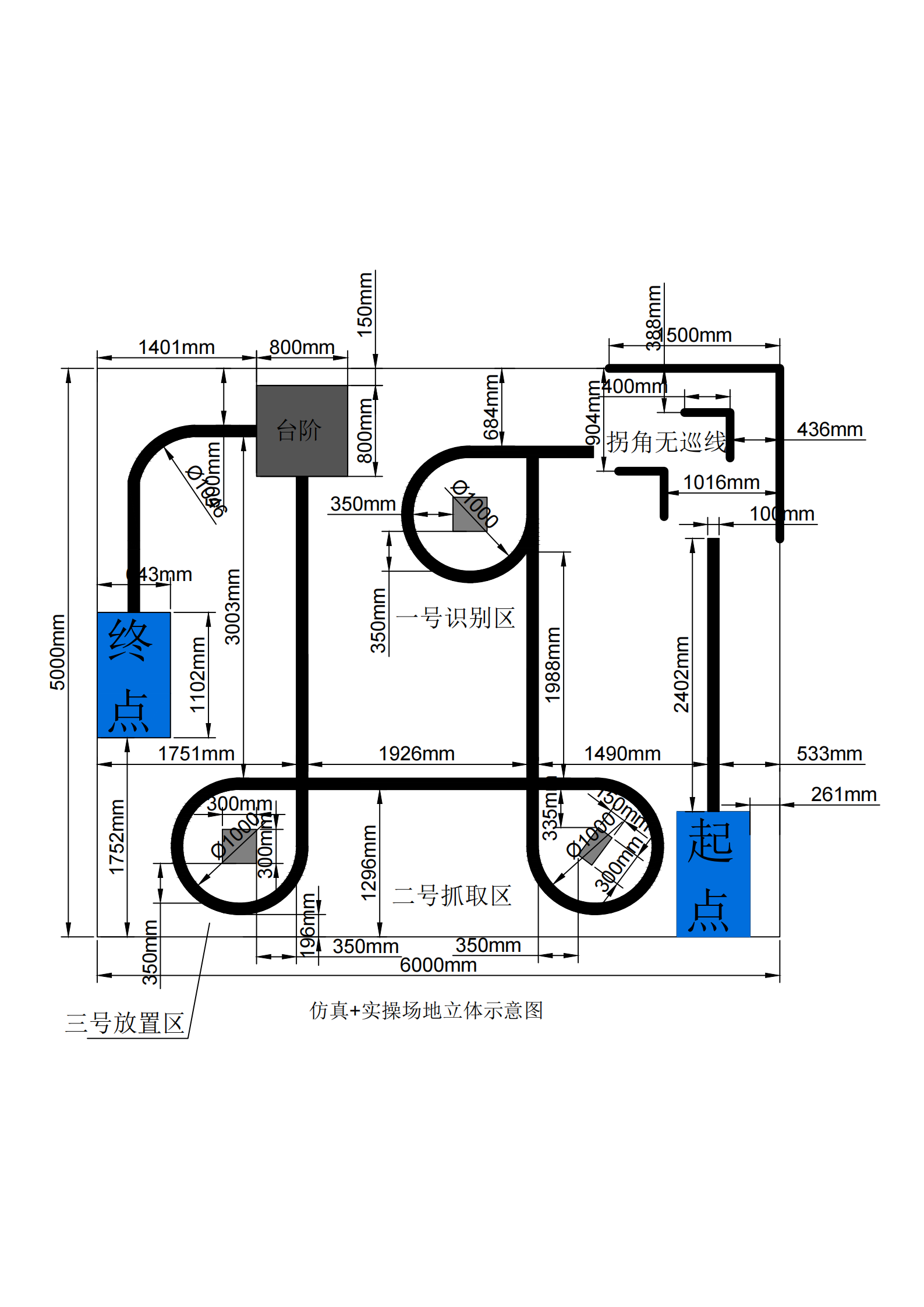
图2-1 机械狗赛道比赛场地尺寸细则

图2-2 机械狗赛道比赛场地立体图
2.2 道具要求
3.参赛要求
3.1 参赛人数
每队≤5人,指导教师≤2人。
3.2 设备规范
1)主办方提供宇树go2机械狗及仿真环境,选手无需自备硬件。
2)严禁更换九格大模型,仅允许优化语义理解、目标识别(也可更换九格多模态大模型)及路径规划算法(主办方提供基础demo及培训),除允许的更换、优化内容,其他内容禁止更换。
3.3 机器人技术要求
(1)机器人数量
机械狗将由于主办方提供8台,选手无须自备。每支参赛队可以用于比赛的机机械狗数量为一台,每台机械狗仅可供一支队伍使用。
(2)安全性
参加比赛的机械狗必须保证安全操作,即不对人和环境造成危害。
(3)独立性
参加比赛的机械狗必须是自动的并且可以自主移动的,比赛中的任何遥控行为都视为犯规,将会被取消比赛资格。当机械狗开始移动后,参赛队将不能再次触碰机械狗,之后的所有任务都将由机械狗自主完成,直到比赛结束。
(4)特别说明
比赛开始前,裁判组将对各参赛队机械狗进行检查,其中必须检查的内容包括机械狗等硬件及机械狗的差异性,若赛前检查未通过,将不允许继续进行比赛。
4.比赛过程
4.1 赛程赛制
(1)根据参赛队伍的数量,决定比赛的轮次。在时间允许的前提下,可进行两轮比赛(如果时间不允许,则比赛为一轮)。在比赛前各队进行抽签,所抽顺序决定参赛队在两轮比赛中的上场顺序。
(2)比赛环节中以裁判的命令为开始信号。
(3)比赛限时10分钟。
(4)比赛最后的名次按照任务得分的总和来排列(如果是两轮比赛,取各队两轮比赛的最高分进行排列),如果出现任务得分相同的队伍,则按照比赛用时来进行排定:任务得分相同的数只队伍,比赛用时短的名次排在前面。比赛过程中参赛队可以主动要求放弃比赛来获得较短的比赛终止时间。
4.2 比赛任务
基于大模型的四足机器狗挑战赛要求参赛队伍通过大模型接收并处理:四足机器狗出发到1号识别区、从左到右告诉我方块的颜色等自然语言指令,驱动四足机器狗在约5米*6米包含起点、终点、障碍、台阶、避障区、一号识别区、二号抓取区、三号放置区等区域且黑色导引线宽度约100mm的场地中完成全自主任务。四足机器狗需依托大模型语义理解与实时推理能力,循线出发后在右上角黑线空白区自动切换为导航模式、到黑线上时自动切换为循线模式,按指令从左到右识别1号识别区3类颜色方块,循线到达2号抓取区,识别桌面方块数字并抓取1+6结果的数字方块,再到达三号放置区放置所夹方块,最终到达终点。
表2-1 四足机械狗竞赛流程
| 任务序号 | 自然语言指令 |
|---|---|
| 任务1 | 四足机器狗出发到1号识别区 |
| 任务2 | 从左到右告诉我方块颜色 |
| 任务3 | 请到达2号抓取区 |
| 任务4 | 抓取1+6结果的数字方块 |
| 任务5 | 放置方块至三号区 |
| 任务6 | 请到达终点 |
注:1、主办方将准备6类一号识别区的方块颜色(红、黄、蓝、绿、橙、紫),在比赛开始前2小时,选手抽签选取颜色。2、九格大模型语义解析为必选项,未使用者直接判0分。3、主办方将为选手提供5套任务自然语言指令,为保证赛事公平,将在比赛前2小时进行公布。
(1)比赛准备
在比赛开始前,参赛队将机械狗移动到场地入口处,并做好准备。准备时间5分钟。
1)参赛队完成所有赛前准备,准备完毕后举手示意(若5分钟准备时间结束后,参赛队未举手示意,比赛直接开始);
2)选手在裁判员的引导下随机抽取任务自然语言指令。
(2)比赛开始
裁判发出开始信号后,比赛正式开始,计时开始。参赛队从场地入口线外启动机械狗一旦开始移动,参赛队员将不能再触碰或遥控机械狗。若机械狗进入场地时触碰到围挡或者参赛队员触碰机械臂,一次扣5分,最多扣4次。
(3)任务阶段
机械狗在裁判发出比赛开始指令后,开始自主执行任务,自主执行任务过程中只有裁判员、和安全员才能接近机械狗2米范围内,跟随机器狗进行计分、拍摄和紧急情况处理。导航过程中若机械狗触碰围挡或者其他任何障碍物,若不影响比赛进行,可继续进行。若影响比赛安全,裁判员必须立即关闭机器狗,比赛终止,比赛成绩为终止前完成的任务分数,后面的流程无法得分,同时比赛计时停止并记录下来作为比赛最终用时。
(4)任务离场
选手在比赛限定时间内完成任务即可离开场地,离场前各参赛队队伍员需签字确认成绩,比赛计时以完成最后一次递送动作的时长为准。比赛用时会被记录下来,在后面进行名次排定出现任务分相同的时候会用到。
4.3 评分标准(共100分)
表2-2 四足机械狗赛道评分标准
| 任务 | 指令示例 | 得分规则 | 扣分项 |
|---|---|---|---|
| 任务1 | “四足机器狗出发到1号识别区” | 完成指令得20分 | 未完成得0分 |
| 任务2 | “从左到右告诉我桌子上方块的颜色” | 回答正确得10分 | 回答错误得0分 |
| 任务3 | “请到达2号抓取区” | 到达指定区域得5分 | 未到达得0分 |
| 任务4 | “请识别桌面的方块数字,并抓取1+6结果的数字方块” | 成功推理“1+6=7”得15分,成功抓取“7”得5分,总体得20分 | 未成功推理“1+6=7”总体得0分 |
| 任务5 | “请到达三号放置区,并放置所夹的方块” | 到达并放置得10分 | 未完成得0分 |
| 任务6 | “请到达终点” | 到达终点得10分,成功抓取瓶子得10分 | 未到达终点或未成功抓取瓶子对应分数得0分 |
| 加分项 | 使用九格多模态大模型目标识别 | 使用得20分 | 未使用九格多模态大模型得0分 |
4.4 违规处理
1)技术违规:擅自修改禁止项(如更换大模型),直接取消成绩。
2)操作违规:未及时报告设备故障或干扰他队,扣10分/次。
3)安全违规:机械狗未急停导致碰,一次扣5分,最多扣4次。